Nanorobot híbrido. Imagen cedida por el Dr. Samuel Sánchez, investigador principal del IBEC
¿Quién no ha soñado alguna vez con poder navegar a través del cuerpo humano para descubrir los misterios que este esconde?
Este sueño ya fue abordado en 1966 de la mano de Richard Fleuscher, que en su “Viaje alucinante” introdujo a un grupo de científicos en el torrente sanguíneo de un ser humano para salvar su vida. En la famosa película, los protagonistas viajaban en un submarino nuclear reducido a la escala microscópica.
Aunque esta imagen nos pueda resultar muy familiar, la realidad dista mucho de esta ficción. En la actualidad, ya se han creado los primeros centinelas que podrían recorrer nuestro cuerpo en busca de sustancias tóxicas, virus o células enfermas, para así curarlas o eliminarlas. Se trata de nanorobots, un invento nacido hace poco más de diez años y que aparece de la mano de la nanotecnología.
Los nanorobots, a diferencia de la nave tripulada de la película, son estructuras muy básicas que recuerdan a las formas que la naturaleza crea en la escala nanométrica y micrométrica. Tubos, esferas, hélices y espirales son las formas más frecuentes para crear estos nano-ingenios, que nos recuerdan a la forma que tienen las células y las moléculas más que a ningún invento del hombre.
Aunque existen muchísimos tipos de nanorobots, aquí os queremos presentar algunos de los más importantes en la actualidad. Al tratarse de un invento muy nuevo, casi todos estos robots se encuentran en fase de investigación, es decir: aun no se pueden utilizar.
A pesar del tamaño nanométrico de los nanorobots, sus avances van a paso de gigante y se espera que en los próximos años estos nanorobots abandonen el laboratorio para formar parte de nuestra vida cotidiana.
Aquí va el resumen:
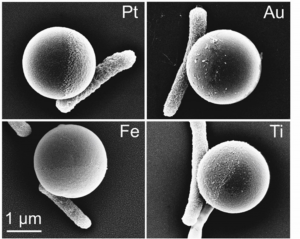
MICROTUBOS: EL NANOROBOT TUBULAR
Se trata de estructuras multicapa que se enrollan para formar un cilindro hueco.
- Las capas interiores: están hechas de metales como el Platino, el Titanio, el Cromo, el Oro o el Hierro. La propulsión en este caso es catalítica: la capa metálica reacciona químicamente con sustancias que se encuentren en su entorno, como el agua oxigenada (peróxido de hidrógeno), para que los nanorobots se impulsen hacia delante. ¡Los motores dejan un rastro de burbujas a su paso!
- Las capas intermedias: Algunos motores tienen una capa intermedia de algún material magnético, como el níquel, y que permite a los investigadores controlar sus movimientos a través de un campo magnético. Como si de un imán se tratase, el nanorobot podría ser dirigido a través del fluido magnéticamente.
- La capa exterior: La parte exterior puede ser un nano-material, como el óxido de grafeno (que es la versión nano del grafito, que encontramos en la mina de los lápices). Estos materiales son capaces de absorver partículas de metales pesados, como el plomo, que contaminan el agua; otros nano-materiales son capaces de cargar moléculas o fármacos.
Un ejemplo de nanorobot tubular lo proponen los investigadores del grupo de Samuel Sánchez en el IBEC. Los investigadores han logrado fabricar nanobots a partir de grafeno para detectar y recoger las partículas de metales pesados en aguas residuales.
Nanotubo. Nanorobot diseñado durante el taller Nanoinventum en la feria 10alamenos9
MICROMOTORES JANUS: EL NANOROBOT ESFÉRICO
Estas estructuras, de decenas de nanómetros, están diseñadas en dos mitades, hechas de materiales distintos. Por ejemplo, media esfera podría ser uno de los materiales catalíticos que mencionábamos antes (Platino, Titanio,…), que se encargase de propulsar la partícula. La otra mitad podría estar funcionalizada, es decir, cubierta de moléculas selectivas, que fuesen capaces de detectar y recoger algunas partículas de interés en un fluido. Esta mitad también se podría utilizar para transportar una partícula a un lugar preciso, como si el nanorobot fuera un transportista que entrega un paquete a un destinatario.
Micromotor Janus. Nanorobot diseñado durante el taller Nanoinventum en la feria 10alamenos9
“Microswimmers” o micronadadores: NANOMOTORES HÍBRIDOS
Muchos de los motores explicados anteriormente son propulsados con combustibles tóxicos y son creados a partir de materiales que no son biocompatibles. Por ese motivo, se han diseñado otros nanorobots que se podrían usar en aplicaciones biomédicas, y así recorrer el cuerpo humano a través del torrente sanguíneo.
La clave está en aprovechar la tecnología nano, por ejemplo con una nanoesfera Janus, para combinarla con un elemento biocompatible que se encargue de propulsarla. La solución propuesta consiste en anclar bacterias, que son grandes nadadores gracias a su flagelo, a una de las dos mitades de estas esferas Janus. La bacteria se anclaría a la partícula por su lado metálico y la propulsaría. En la otra mitad, la partícula Janus podría estar recubierta de aquel fármaco de interés que quisiéramos liberar, por ejemplo para atacar a células cancerígenas. La buena noticia es que las bacterias se propulsan utilizando los fluidos biológicos que las rodean, con lo cual estos sistemas no serían dañinos para los seres vivos.
Nano-nadador. Nanorobot diseñado durante el taller Nanoinventum en la feria 10alamenos9
Bibliografía
Smart nano-bio-devices (2017) Instituto de Bioingeniería de Cataluña
Web Nanoinventum (2017)
Micro/nanorobots for biomedicine: Delivery, surgery, sensing, and detoxification (2017) SCIENCE ROBOTICS | Vol. 2, Issue 4, eaam6431; doi:10.1126/scirobotics.aam6431
Autora: Pilar Rodríguez-Franco